Robotics design and simulation part 1
Robotics design and simulation part 1
MP4 | Video: h264, 1280x720 | Audio: AAC, 44.1 KHz, 2 Ch
Genre: eLearning | Language: English
+ srt | Duration: 36 lectures (4h 54m) | Size: 1.2 GB[/center]
Robotics position kinematics
What you'll learn
describe the position kinematics of any robot configuration
- Be able to describe the position and orientation of objects in 2-D plane and 3-D space
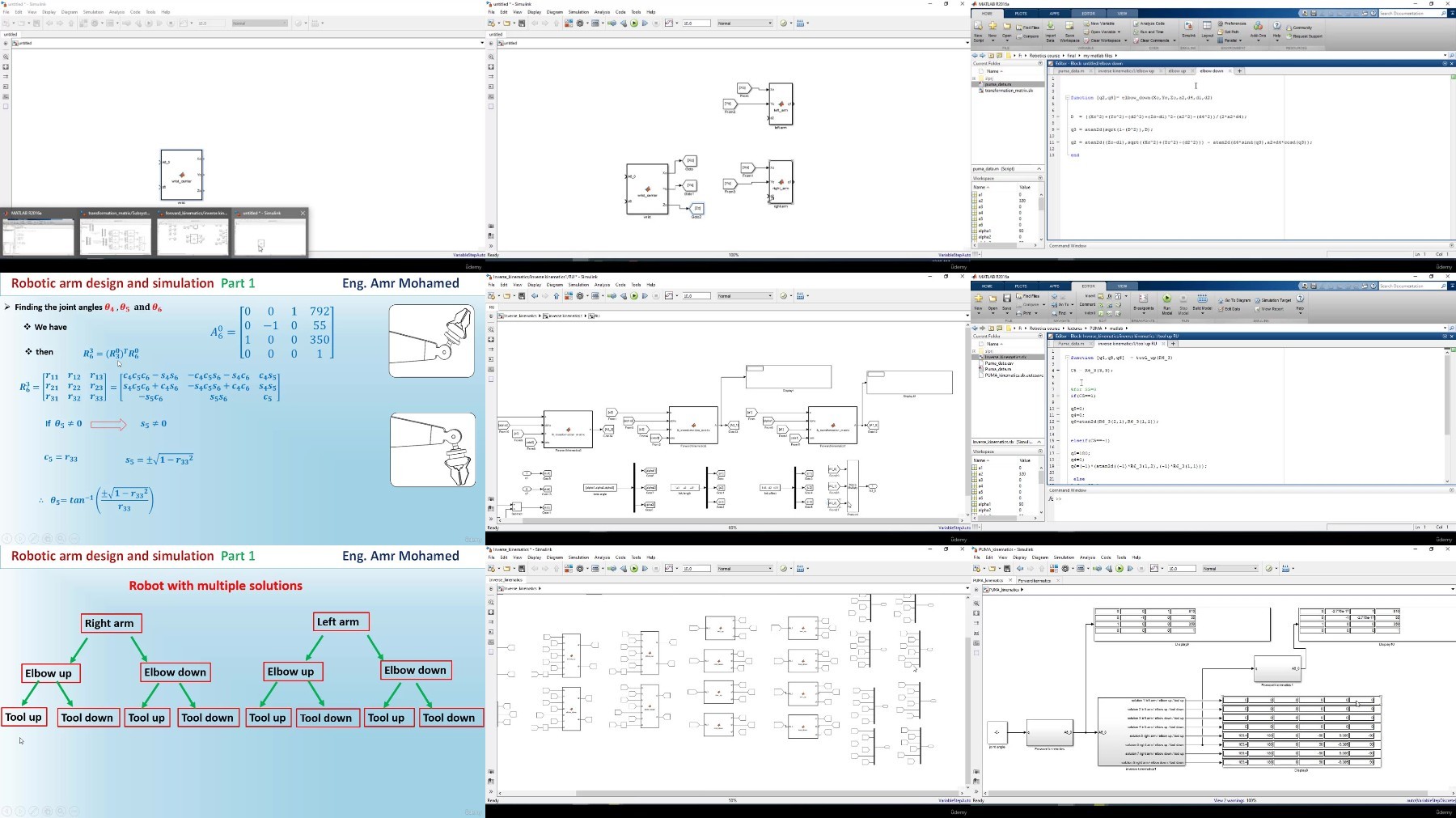
- Model the position kinematics of any robot on Matlab
- Basics of Matlab programming and simulink
Requirements
Basics of trigonometry
Basics of Linear algebra
Basics of vector calculus
Basics of MATLAB programming and Simulink (preferred)
Solidworks 3D modeling (preferred)
If you don't have any knowledge of any of these recruitments , don't worry all the requirements you need sufficient for this course are covered, and if you are familiar with any of these you can skip it.
Description
If you are a robotics engineer, student, or even an amateur who want to have a strong basics and get into the field of robotics the right way, then you will enjoy this course. In this course you will learn the position kinematics in which you will be able to describe the position and orientation of the robot gripper or the end-tool with respect to the robot base and calculate how much each actuator should move to achieve your desired position and orientation that is necessary to be able to generate the robot trajectory. You will learn how to use MATLAB to build the kinematics model and verify your result with a SOLIDWORKS robot design
The course starts by covering all the basics you need to understand the course content, the it moves to the first chapter the contains the basics descriptions of position and orientation and represent the two descriptions into the description of frame, in the next chapter it shows the forward kinematics and how to relate the motion of the robot joints and its end- effector position and orientation, in the last chapter that explains the inverse kinematics and how to make the robot joints achieve tour desired position and orientation.
Who this course is for
Students
Industrial and robotics engineers
Anyone interested in robotics
https://rapidgator.net/file/1e039bc23b397a2bd251e750e5986b04/Udemy_Robotics_design_and_simulation_part_1.z01
https://rapidgator.net/file/1edafbbf2cf3f8f9031a03d2b1bcd211/Udemy_Robotics_design_and_simulation_part_1.zip
https://voltupload.com/70kiahy0pjs0/Udemy_Robotics_design_and_simulation_part_1.z01
https://voltupload.com/qt40eb01qlkv/Udemy_Robotics_design_and_simulation_part_1.zip
Free search engine download: Udemy Robotics design and simulation part 1